
評価工程
制御ソフトが完成したので評価工程に入ります。
MBD工程上は
単体評価(ECU単体での机上確認)
結合評価(複数ECUを接続した状態での机上確認)
実機評価(全ECUを実機に搭載した状態での評価)
と3ステップありますが、今回の開発実例ではECUが1だけ かつ 実機試験のリスクが少ないので、単体評価と結合評価は実施せずに実機評価のみを行います。自動車の制御開発など、ソフトのバグが事故につながる可能性がある場合は入念に単体評価・結合評価を行い、十分にソフトの品質を高めてから実機評価に入る必要があることに注意してください。
手順① 実機の用意
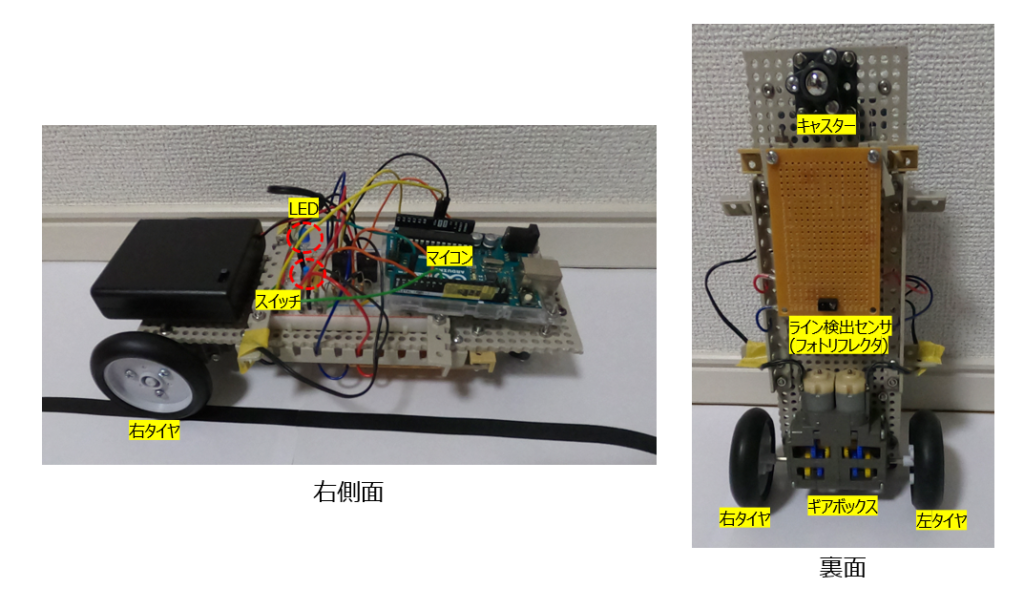
下図のようなライントレースロボットを作成しました。
マイコンはArduino Unoを使用。
ライン検出センサとしてフォトリフレクタ(LBR-127HLD)を使用。
タイヤ、キャスター、ギアボックス、ボディーはタミヤのパーツを使用。
手順② ソフトの書き込み
SimulinkとArduinoマイコンを接続して制御モデルを書き込みます。
SimulinkとArduinoマイコンの接続にはSimulink Support Package for Arduino HardwareというMathWorks社公式のアドオンを使用します。
(https://jp.mathworks.com/help/supportpkg/arduino/index.html)
手順③ 動作確認
要件定義工程で定義した各要件をすべて満たしたソフトが完成しているかどうかを実機を使って確認します。MILSで制御ロジックの確認が済んでいるのでライントレース制御のパラメーターを微調整するだけで完成しました。

以上で全要件の動作確認が完了です。
評価工程が完了したので開発プロジェクト完了とします。
おわりに
ライントレースロボットを題材にモデルベース開発を実践してみました。開発の流れを大まかに理解していたくことができれば幸いです。
実際の開発業務は規模が大きく、関連するメンバーも多岐に渡ります。評価工程に入ってから不具合や認識の齟齬が発生してしまうと大きな手戻りとなってしまいます。モデルベース開発を活用して効率的に開発を行えるようになっていきましょう。